 2019, Vol. 37
2019, Vol. 37Institute of Oceanology, Chinese Academy of Sciences
Article Information
- CHEN Chuntao, ZHU Jianhua, ZHAI Wanlin, YAN Longhao, ZHAO Yili, HUANG Xiaoqi, YANG Weiwei
- Absolute calibration of HY-2A and Jason-2 altimeters for sea surface height using GPS buoy in Qinglan, China
- Journal of Oceanology and Limnology, 37(5): 1533-1541
- http://dx.doi.org/10.1007/s00343-019-8216-8
Article History
- Received Aug. 29, 2018
- accepted in principle Nov. 21, 2018
- accepted for publication Feb. 1, 2019




The TOPEX/Poseidon (T/P), ERS-1/2, Jason-1/2, Envisat, HY-2A and Jason-3 altimeters have been providing continuous sea surface height (SSH) measurements for more than 20 years. Altimeter data are widely applied in oceanography, geodesy and geophysics (Fu and Cazenave, 2001; Fang, 2003; Chen, 2010). The most important application of altimeters is in the accurate monitoring of sea-level variations, which requires a precise determination of the error budget of the altimeter measurements (Frappart et al., 2015), and their wide application is based on their high accuracy. Since the T/P altimeter was launched, the measurement accuracy of successive altimeters is better than 3 cm, an absolute benefit of the on-orbit calibration methodology.
On-orbit calibration of the altimeter missions can improve the measurement accuracy of the altimeter sea surface height (SSH) and allow calibration of the SSH bias, which may increase over time. Altimeter SSH calibration is used to compare the SSH measured by altimetry with an independent measurement from the ground truth (Cancet et al., 2013). The two most used calibration methodologies for altimeter SSH calibration are the tide gauge and the GPS buoy. Altimetry SSH calibrations are usually performed under the altimeter ground track using a tide gauge or GPS measurements at permanent calibration sites (Bonnefond et al., 2003a, b, 2013, 2015; Watson et al., 2003, 2011, 2016; Haines et al., 2010, 2016; Mertikas et al., 2010, 2016a, b). The GPS buoy method can give a direct sea level measurement at the altimeter nadir point in the same reference frame as the altimeter SSH, which does not require any modeling of the geoid or tidal error (Cancet et al., 2013). The GPS buoy method that was used in this study is therefore a purely geometric relationship and only relies on periodic GPS buoy deployment.
The GPS buoy enables the measurement of sea level in the same absolute reference frame as the altimeter on an epoch-by-epoch basis. The GPS buoy consists quite simply of a floating platform equipped with GPS instrumentation, including a GPS receiver and a GPS antenna. Exertier et al. (2000) designed a GPS buoy and used it to calibrate the T/P altimeter. Compared with the tide gauge, the difference in the calibration result with a GPS buoy was only 1 cm. Using a GPS buoy, Cheng et al.(2001, 2010) calibrated the T/P, Jason-1 and Jason-2 altimeters in Lake Erie, and their results agreed well with the results from the dedicated calibration sites; Bonnefond et al. (2003a, b) designed GPS buoys and used them to calibrate the SSH of the T/P and Jason-1 altimeters at the Corsica calibration site; the bias from the GPS buoy for T/P (ALT-B) was 0.78±1.01 cm, and the bias from the GPS buoy for Jason-1 (POSEIDON-2) was 10.04±1.60 cm. Watson et al.(2003, 2011, 2016) designed MK-Ⅱ and MK-Ⅲ style GPS buoys and used them to estimate the absolute bias of T/P, Jason-1 and Jason-2 at the Bass Strait calibration site, and their bias values (for T/P was -1.0±1.9 cm; for Jason-1 GDR-C was 10.46±0.48 cm; for Jason-2 GDR-T was -16.97±0.36 cm) were equivalent to other determinations from the dedicated National Aeronautics and Space Administration (NASA) and France Centre National d'Études Spatiales (CNES) calibration sites. Martinez-Benjamin et al. (2004) also used a GPS buoy to calibrate the T/P and Jason-1 altimeters; Zhai et al. (2012) introduced the principle and the method of the GPS buoy for use in altimeter calibration, focusing on the advantages of the GPS buoy calibration method and GPS in resolving technical difficulties in the satellite altimeter calibration campaigns. Chen et al. (2014) introduced a design for a GPS buoy and assessed its accuracy by numerical simulation and use of a tide gauge.
The HY-2A satellite was successfully launched on 16 August 2011 and the data, which were archived, is delivered by the National Satellite Ocean Application Center (NSOAS) of the Ministry of Natural Resources of the People's Republic of China. Four microwave instruments were carried into space for observing ocean dynamic environment parameters such as significant wave height, sea surface wind and SSH on a global scale (Jiang et al., 2012). The HY-2A satellite altimeter is an important instrument which can provide SSH on a global scale, and its calibration plays a key role in the application of HY-2A SSH data. Peng et al. (2015) used one cycle (cycle 44) of HY-2A IGDR data to calculate the global crossover SSH differences, and obtained a standard deviation of 7.48 cm. Yang et al. (2016) used the HY-2A IGDR data from cycle 18 to cycle 23 to calculate the crossover differences between HY-2A and Jason-2, and obtained a standard deviation of 7.0 cm. Jiang et al. (2018) used the cross-calibration analysis method to evaluate the reprocessed HY-2A altimeter data against Jason-2. The data was evaluated to be of good quality and to have a low noise level compared with Jason-2.
Many previous studies have used the crosscalibration method to evaluate the precision of HY-2A altimeter SSH. However, there are little absolute calibration results for HY-2A altimeter SSH, besides the Crete calibration site (Mertikas et al. (2016b)). In this study, we carried out absolute calibration experiments for the HY-2A altimeter and Jason-2 SSH, conducted from August 2014 to July 2015. Section 2 introduces the calibration site, the calibration method and calibration instrumentation, followed by a discussion of the GPS data and altimeter data processing strategies. Section 3 discusses the data used and data processing. Section 4 presents the absolute calibration results for Jason-2 and HY-2A SSH. The error in HY-2A SSH is verified against the results from the Crete calibration site and the results of the cross-calibration method are presented. Section 5 presents our conclusions.
2 CALIBRATION METHODOLOGY 2.1 Calibration siteThe calibration methodology for the South China Sea (SCS) involved the deployment of GPS buoys at chosen comparison points along the altimeter ground track. The absolute comparison points in the SCS were located approximately 26 km east of Qinglan Port in Hai Nan Province along the descending altimeter ground track of Jason-2, and along the ascending altimeter ground track of the HY-2A altimeter. Selection of the offshore comparison point needs to take into account the GPS data resolution accuracy and the distance between the altimeter footprint and land. Thus, point selection is a compromise between minimizing the baseline lengths for GPS buoy processing and maximizing the distance from land to validate the altimeter SSH. Taking into account the size of the altimeter footprint and the local geoid slope, the GPS buoys were deployed within 200 m of the nominal position of the comparison point.
The crossover point of the HY-2A altimeter and Jason-2 is located approximately 40 km east of Qinglan Port of Hai Nan Province, which may be too far to set up a GPS reference station, so a GPS buoy was not deployed at the crossover point of the HY-2A altimeter and Jason-2. Two comparison point were selected, with a rectilinear distance between them of approximately 4 km. To support the GPS buoy deployments, a GPS station was established at Qinglan Port. The Qinglan calibration points are shown in Fig. 1.

|
| Fig.1 The Qinglan calibration points Note the location of the GPS Reference Station and collocated GPS buoys. The selected absolute comparison point for Jason-2 is shown with a blue cross on descending pass 114, and the HY-2A altimeter is shown with a red cross on descending pass 0093. Red dots are the HY-2A altimeter ground points, black dots are Jason-2 altimeter ground points. |
The calibration methodology was the same as used at the Bass Strait (Watson et al., 2003), which was centered on the estimation of the SSH at the chosen comparison point using a GPS buoy. It consisted of the determination of the absolute altimeter bias, which required simultaneous measurements of the SSH by the GPS buoy and by the altimeter in the same terrestrial reference frame at the exact comparison point. In the most simplified form, the absolute altimeter SSH bias (BiasAlt) is given by:
 (1)
(1)where SSHAlt and SSHBuoy are the SSH estimated from the altimeter and GPS buoy measurements. The SSH from the altimeter is given by Crétaux et al. (2011):
 (2)
(2)where hAlt is the height of the satellite above the reference ellipsoid calculated using a precise orbit determination technique.
The corrected range is the nadir altimeter range (R) from the satellite to the sea surface, which needs to take into account both the propagation corrections caused by delays due to the attenuation of electromagnetic waves in the atmosphere and geophysical corrections applied to the range.
 (3)
(3)where ΔRwet is the wet troposphere correction, which is the range delay caused by water vapor and cloud liquid water in the troposphere; ΔRdry is the dry troposphere correction, which is the range delay due to the dry gas component of the troposphere; ΔRion is the atmospheric refraction range delay due to the free electron content associated with the dielectric properties of the ionosphere and SSB is the sea state bias due to the sea-state effects.
 (4)
(4)where ΔRsolid_earth, ΔRpole_tide and ΔRocean_loading are corrections respectively accounting for crustal motions due to the solid earth, polar tides and ocean load tides, which are implicitly corrected for in the GPS solution for the SSH using the TRACK software (Herring, 2002). This means that our GPS SSH only revealed sea fluctuations (ocean tide) and none of the crustal motions that are recorded by the satellite.
 (5)
(5)where SSHBuoy is the reference ellipsoidal height of the GPS buoy relative to International Terrestrial Reference Frame 2008 (ITRF 2008) and SSHBuoy is calculated relative to the ellipsoidal height of the GPS reference station (hRefGPS), for which the GPS relative change in the ellipsoidal height to the buoy (dhRefGPS to buoy) needs to be used. SSHBuoy and SSHAlt used the same reference frame (ITRF 2008), but different reference ellipsoid parameters. These need to be changed to the same reference ellipsoid using dhRefbuoy to alt.
2.3 Instrumentation 2.3.1 GPS buoyThe dedicated GPS buoy shown in Fig. 2 was designed for altimeter SSH calibration. The accuracy of this GPS Buoy in measuring the SSH has been assessed, and further details are given in Chen et al. (2014). In this paper, we only summarize the evaluation method and the results.

|
| Fig.2 Dedicated GPS buoy Note the approximate water level, positioning the antenna reference point (ARP) approximately 87 mm above the mean water level. |
First, a hydrodynamics numerical simulation model of the buoy was used to assess the effect of the roll angle and the heave rate of the buoy on the wave periods (see Fig. 3 in Chen et al. (2014)). Next, four in-situ accuracy testing experiments were carried out and the results showed an error of 0.55 cm RMS, indicating that the GPS buoy could be used for altimeter SSH calibration.

|
| Fig.3 The continuously-operating GPS station |
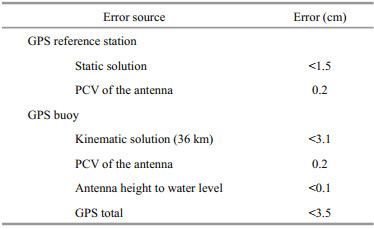
The distance between the GPS buoy and the GPS reference station to evaluate the accuracy of the GPS buoy is a compromise, which needs to take into account both the GPS solution accuracy (shorter distance) and altimeter measurement validity (longer distance). A distance of 36 km was chosen (more details are given in Chen et al. (2014)). The error budget for the GPS buoy for sea level measurement is shown in Table 1. Estimates for the GPS reference station analysis and GPS kinematic analysis have already been discussed (Chen et al., 2014). How the uncertainty of the GPS position is related to the GPS buoy antenna height measurement and the phase center variation (PCV) of the antenna have also been discussed (line 2 in Table 1). The effect of the antenna dome is taken into account in the GPS solution. The static solutions can be determined within several millimeters after longer integrating time. Using the 36-km GPS reference station, the final error estimate for the SSH measured by the GPS buoy was better than 3.5 cm RMS. The precision for GPS buoy measuring SSH can be further improved if more reference stations are used.
The GPS reference station in the Qinglan Port calibration area was a continuously-operating receiver mounted on a tripod and positioned at Qinglan Port during our experiment (Fig. 3). The GPS hardware included a Trimble PRO XRT 852 receiver from Trimble Inc., Sunnyvale, CA, USA, a Trimble 59800 choke ring antenna and an antenna dome. Data were logged on-site at 1-s intervals.
The GPS reference station logged at 1-s intervals for the whole day to support kinematic GPS processing. Another GPS station, also logging at 1-s intervals, was used as backup for approximately 12 h either side of the altimeter overflight time.
3 DATA PROCESSING 3.1 GPS ProcessingGPS processing for the altimeter calibration included two main steps. Firstly, the positions of the GPS reference stations were resolved in a global terrestrial reference frame (ITRF 2008) and then transferred to the HY-2A and Jason-2 reference frame. This first step ensured that the SSH data measured by the GPS buoy had the same reference frame as the SSH from the altimeters. The second step used the RTK technique to acquire the sea level of the GPS buoys on a continuous basis during GPS buoy deployment at the altimeter nadir point.
A. IGS reference station analysis
The absolute positions of the reference stations were calculated using GAMIT (King and Bock, 2010), which was developed by the Massachusetts Institute of Technology. Quality control for the GPS reference station data used the TEQC software (Estey and Wier, 2013). The sample interval for the reference station data was 1 s, while the sample interval for the International GPS Service (IGS) data was 30 s; thus, the reference station data needed resampling from 1 s to 30 s before resolving the absolute positions of the reference stations.
From the 300 permanent IGS stations across the globe, the following 26 stations were chosen as GPS reference stations for the statics data solution: Aira, ccj2, chan, chum, cnmr, cusv, daej, hyde, iisc, irkm, lhaz, mago, mcil, mizu, nril, nvsk, pbri, pets, pimo, stk2, twtf, ulab, urum, usud, yakt and yssk.
B. Kinematic analysis
After resolving the absolute positions of the GPS reference stations, RTK kinematic processing techniques using the TRACK software developed at MIT (Herring, 2002) were used to acquire the sea level of the GPS buoys during GPS buoy deployment at the altimeter nadir point. The TRACK software is a kinematic GPS positioning program, initially developed for airborne laser altimetry applications and now commonly used for GPS resolution.
3.2 Altimetry processingFor the HY-2A altimeter, 1-Hz data from the IGDR data files were adopted (as indicated in Table 2, row 2).

For Jason-2, the most recent version of the Jason-2 GDR files was used (as indicated in Table 2, row 2). Some corrections from the altimeter product were also used. The following corrections were applied: dry troposphere and wet troposphere corrections, seastate bias and ionosphere corrections.
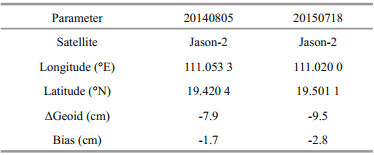
4 HY-2A/JASON-2 SSH CALIBRATION 4.1 Absolute calibration of Jason-2 by the GPS buoyAfter evaluating the accuracy of the GPS buoys, the absolute calibration experiments were launched for the Jason-2 and HY-2A altimeters in the SCS (as shown in Fig. 1). The Jason-2 calibration experiment was successfully launched on 20 June 2008 as a continuation of the TOPEX/Poseidon and Jason-1 altimeter missions, in cooperation with CNES, the European Organisation for the Exploitation of Meteorological Satellites (EUMETSAT), NASA, and the National Oceanic and Atmospheric Administration (NOAA). In this study, the Jason-2 SSH data were Level 2 geophysical data records (GDR) D vision products distributed by CNES-AVISO. The Jason-2 SSH has undergone absolute calibration at an operational calibration site for almost ten years. There were two Jason-2 calibration experiments in this study, as shown in Table 3. Before using Eqs.1–5 to calculate the error, the main altimeter range correction terms were processed as shown in Figs. 4–6. A linear fit could not be processed for the wet troposphere correction because of the big variation at the time of closest approach (TCA). Instead, the ECMWF wet troposphere was used.

|
| Fig.4 Ionosphere correction process method: mean over 20 s to the TCA |

|
| Fig.5 Dry troposphere correction process method Linear fit over -2 s to 5 s around the TCA. Interpolated at the TCA. |

|
| Fig.6 Sea state bias correction process method Cubic fit over TCA to +10 s around the TCA. Interpolated at the TCA. |
Jason-2 overflew the GPS buoy position on 5 August 2014 and 18 July 2015 in the SCS. The ground track of the Jason-2 altimeter is designed to exactly return within 1 km of a nominal position (OSTM, 2017), which may have resulted in the deploying position of the GPS buoy not being exactly on the ground track of the Jason-2 altimeter. The geoid difference between these two positions (GPS buoy and altimeter) can be calculated from Eq.1. The absolute altimeter SSH bias (BiasAlt) is given by:
 (6)
(6)The negative sign indicates when the SSH measured by the altimeter is too low. Using Eqs.1–6 and the main altimeter range correction terms shown in Figs. 4–6 gave the results shown in Table 3 for the Jason-2 SSH calibration in the SCS. The mean bias was -2.3 cm, which is in good agreement with the estimates computed by other altimeter calibration groups at the Harvest calibration site (see Haines et al., 2016), the Corsica calibration site (see Bonnefond et al., 2016) and the Bass Strait calibration site (see Watson et al., 2016).
4.2 Absolute calibration of HY-2A by the GPS buoyThe HY-2A altimeter overflew the GPS buoy four time in the SCS (as shown in Fig. 1) and the results are shown in Table 4. Before using Eqs.1–5 to calculate the HY-2A SSH bias, the main altimeter range correction terms were processed using the same method as for Jason-2 (see Section 3); the absolute bias was calculated from Eq.6.

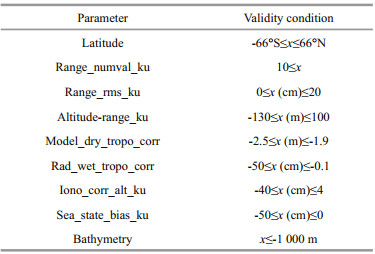
For the HY-2A altimeter, the bias on the SSH in Qinglan varied from -53.5 cm to -75.6 cm, which was significantly bigger than for Jason-2. Cross-calibration for the HY-2A SSH was carried out using the Jason-2 SSH data as the "true data". Before using the altimeter data, they were filtered using the data filter criteria shown in Table 5.
Almost two years of HY-2A IGDR data (cycle 52 to cycle 102, from September 2013 to August 2015) were used here. For cross-calibration, the HY-2A Ku band SSH data and the Jason-2 data were collected for comparison. The orbit inclination angle of Jason-2 is 66.04°, while the orbit inclination angle of HY-2A is 99.34°, so all comparisons are located from 66°N to 66°S. Almost two years of Jason-2 GDR data from cycle 192 to cycle 263 were collected, covering almost the same time span as for the HY-2A data described above. Data from both HY-2A and Jason-2 were used for the Ku band SSH measurements.
For the HY-2A and Jason-2 altimeter cross comparisons, pairs of altimeter data were selected for a time window of 0.5 h and a spatial window of 5 km to filter out time and spatial variability effects (accounting for the geoid slope). The cross-calibration results were calculated using one altimeter cycle as the statistical period (as shown in Fig. 7). The bias of the HY-2A SSH (blue line marked with " × " in Fig. 7) shows a negative trend and the RMS shows a positive trend. The black dots (Fig. 7) show the bias of the HY- 2A SSH versus the GPS buoy SSH, which agree with the cross-calibration results. The standard deviations (STD) of the cross-calibrations in every cycle (green line) are stable, which means the HY-2A SSH is steady with an increase in the bias. This verifies the HY-2A altimeter absolute calibration results for the GPS buoy shown in Table 4. The reason for the negative trend in the HY-2A SSH bias may be due to the time tag of the HY-2A altimeter; further analysis will be carried out.

|
| Fig.7 Results of cross-calibration of HY-2A SSH with Jason-2 SSH and absolute calibration of HY-2A SSH with the GPS buoy SSH |
The calibration group in Crete has also cross calibrated the HY-2A SSH with the Jason-2 SSH from cycle 54 to cycle 62 of the HY-2A altimeter (Mertikas et al., 2016b). The results from the Crete calibration site show that, from cycle 54 to cycle 62, the mean bias is -27.6±2.7 cm against Jason-2 (Mertikas et al., 2016b). In this study, the mean bias in the crosscalibration of HY-2A was -25.5±6.2 cm (blue line marked with " × " in Fig. 7) which is in good agreement with the results from the Crete calibration site.
5 SUMMARY AND CONCLUSIONWe assessed the accuracy of SSH measurements using a GPS buoy. The final error budget estimate for the GPS buoy measuring the SSH was almost 3.5 cm. The assessment verified that a GPS buoy can be used in altimeter SSH calibration.
Estimate of the absolute bias derived from the GPS buoy was -2.3 cm for Jason-2 and -53.5 cm to -75.6 cm for HY-2A. Cross-calibration of the HY-2A altimeter and Jason-2 in the Qinglan coastal area showed that the bias in the HY-2A SSH against the GPS buoy's SSH is in agreement with the cross-calibration results.
Although the absolute bias for the HY-2A and Jason-2 estimates from this campaign were determined from a small sample, the results also substantiate the success of the GPS buoy design and the data processing method used in the HY-2A and Jason-2 altimeter SSH calibration experiments. We need more in-situ calibration experiments to calibrate the HY-2A SSH. A combined analysis of the GPS buoy, its mooring and tide gauge data will provide a more reliable set of results. Together, the GPS buoy, its oceanographic mooring and tide gauge measurements can provide a unique set of tools for determining the HY-2A altimeter bias and bias drift.
6 DATA AVAILABILITY STATEMENTThe HY-2A altimeter IGDR data that support the findings of this study are available on request from the National Satellite Ocean Application Service (NSOAS); they were used under license for the current study and are not publicly available. However, data are available from the authors upon reasonable request and with the permission of NSOAS. Jason-2 GDR-D data were produced and distributed by Aviso+ (https://www.aviso.altimetry.fr/) as part of the SSALTO ground processing segment. GPS Buoy data are available on request from the corresponding author. The GPS buoy data have not been made publicly available at the request of the organizations that funded this study.
7 ACKNOWLEDGMENTWe would like to thank a number of people for contributing to this work, including LIN Mingsen, Bonnefond P, MA Chaofei, XU Xiyu, SHEN Hua, ZHANG Xiaoxu, and ZHANG Qian for useful discussions. We thank the NSOAS of the Ministry of Natural Resources for providing HY-2A RA IGDR data. We also grateful to CNES-AVISO for providing free access to the Jason-2 GDR-D data. We thank Michael Luetchford, BTech, from Liwen Bianji, Edanz Group China (www.liwenbianji.cn/ac), for editing the English text of a draft of this manuscript.
Bonnefond P, Exertier P, Laurain O, Guillot A, Guinle T, Picot N, Féménias P. 2013. Corsica: a multi-mission absolute calibration site. In: 2013 OSTST Meeting. OSTST, Boulder, CO.
|
Bonnefond P, Exertier P, Laurain O, Guillot A, Picot N, Cancet M, Lyard F. 2015. SARAL/AltiKa absolute calibration from the multi-mission Corsica facilities. Marine Geodesy, 38(S1): 171-192.
|
Bonnefond P, Exertier P, Laurain O, Ménard Y, Orsoni A, Jan G, Jeansou E. 2003a. Absolute calibration of Jason-1 and TOPEX/Poseidon altimeters in Corsica:special issue:Jason-1 calibration/validation. Marine Geodesy, 26(3-4): 261-284.
DOI:10.1080/714044521 |
Bonnefond P, Exertier P, Laurain O, Ménard Y, Orsoni A, Jeansou E, Haines B J, Kubitschek D G, Born G. 2003b. Leveling the sea surface using a GPS-catamaran:special Issue:Jason-1 calibration/validation. Marine Geodesy, 26(3-4): 319-334.
DOI:10.1080/714044524 |
Cancet M, Bijac S, Chimot J, Bonnefond P, Jeansou E, Laurain O, Lyard F, Bronner E, Féménias P. 2013. Regional in situ validation of satellite altimeters:calibration and crosscalibration results at the Corsican sites. Advances in Space Research, 51(8): 1 400-1 417.
DOI:10.1016/j.asr.2012.06.017 |
Chen C T, Zhai W L, Yan L H, Zhang Q, Zhang X X, Zhu J H, He S Y. 2014. Assessment of the GPS buoy accuracy for altimeter sea surface height calibration. In: Proceedings of 2014 IEEE Geoscience and Remote Sensing Symposium.IEEE, Quebec City, QC, Canada. p.3 101-3 104.
|
Chen C T. 2010. Using Muti-sensor Satellite Data to Study the Variability of Kuroshio. Ocean University of China, Qingdao. (in Chinese with English abstract)
|
Cheng K C, Kuo C Y, Tseng H Z, Yi Y C, Shum C K. 2010. Lake surface height calibration of jason-1 and Jason-2 over the great lakes. Marine Geodesy, 33(S1): 186-203.
|
Cheng K, Shum C, Yi Y, Calmant S, Yi Y. 2001. Absolute radar altimeter calibration using GPS water level measurements.In: Proceedings of Workshop on SSG 2.194, GPS Water Level Measurements, GLOSS GE-7 Meeting. University of Hawaii, Honolulu, USA.
|
Crétaux J F, Calmant S, Romanovski V, Perosanz F, Tashbaeva S, Bonnefond P, Moreira D, Shum C K, Nino F, Bergé-Nguyen M, Fleury S, Gegout P, Abarca Del Rio R, Maisongrande P. 2011. Absolute calibration of Jason radar altimeters from GPS kinematic campaigns over Lake Issykkul. Marine Geodesy, 34(3-4): 291-318.
DOI:10.1080/01490419.2011.585110 |
Estey L, Wier S. 2013. Teqc Tutorial: Basics of Teqc Use and Teqc Products. UNAVCO, Boulder.
|
Exertier P, Bonnefond P, Laurain O, Barlier F, Ménard Y, Jeansou E, Orsoni A, Haines B, Kubitschek D, Born G. 2000. Absolute Altimeter Calibration in Corsica. AVISO, Newsletter 7. http://www.aviso.oceanobs.com/en/newsstand/newsletter/newsletter07/absolute-altimetercalibration-in-corsica/index.html.
|
Fang M Q. 2003. An East China Sea (ECS) Model with Multisensor Satellite Data Driving and Assimilation and Studies of Some Phenomena in the ECS. Ocean University of China, Qingdao.
|
Frappart F, Roussel N, Biancale R, Benjamin J J M, Mercier F, Perosanz F, Pasquin J G, Davila J M, Gomez B P, Gomez C G, Bravo R L, Gomez A T, Ripoll J G, Pajares M H, Lino M S, Bonnefond P, Casanova I V. 2015. The 2013 Ibiza calibration campaign of Jason-2 and SARAL altimeters. Marine Geodesy, 38(S1): 219-232.
DOI:10.1080/01490419.2015.1008711 |
Fu L L, Cazenave A. 2001. Satellite Altimetry and Earth Sciences: A Handbook of Techniques and Applications.Academic Press, San Diego. p.407-435
|
Haines B J, Desai S D, Born G H. 2010. The harvest experiment:calibration of the climate data record from TOPEX/Poseidon, Jason-1 and the ocean surface topography mission. Marine Geodesy, 33(S1): 91-113.
|
Haines B, Desai S, Shah R, Leben B, Masters D, Meinig S C, Nerem S S. 2016. The harvest experiment: connecting Jason-3 to the long-term sea level record. In: Proceedings of 2016 OSTST Meeting. OSTST, La Rochelle, France.
|
Herring T A. 2002. TRACK GPS kinematic positioning program, Version 1.07. Massachusetts Institute of Technology, Cambridge, MA.
|
Jiang M F, Xu K, Liu Y L. 2018. Global statistical assessment and cross-calibration with jason-2 for reprocessed HY-2 A altimeter data. Marine Geodesy, 41(3): 289-312.
DOI:10.1080/01490419.2017.1375053 |
Jiang X W, Lin M S, Liu J Q, Zhang Y G, Xie X T, Peng H L, Zhou W. 2012. The HY-2 satellite and its preliminary assessment. International Journal of Digital Earth, 5(3): 266-281.
DOI:10.1080/17538947.2012.658685 |
King R W, Bock Y. 2000. Documentation for the GAMIT GPS Analysis Software. Massachusetts Institute of Technology, Cambridge, MA.
|
Martinez-Benjamin J J, Martinez-Garcia M, Lopez S G, Andres A N, Pozuelo F B, Infantes M E, Lopez-Marco J, Davila J M, Pasquin J G, Silva C G, Bonnefond P, Laurain O, Isanta A M B, Castellon M A O, Lopez J T, Gomez B P, Fanjul E A, Velasco G R, Gomis D, Marcos M, Menard Y, Jan G, Jeansou E, Lyard F, Roblou L. 2004. Ibiza absolute calibration experiment:survey and preliminary results. Marine Geodesy, 27(3-4): 657-681.
DOI:10.1080/01490410490883342 |
Mertikas S P, Donlon C, Zavrocordatos C, Tziavos I N, Desjonqueres J D, Galanakis D, Vergos G, Andersen O, Tripolitsiotis A, Picot N, Fratzis X, Peng Hailong. 2016a.Gavdos/West Crete Cal-Val site: over a decade calibration for altimetry, oral. In: Proceedings of 2016 OSTST Meeting. OSTST, La Rochelle, France.
|
Mertikas S P, Ioannides R T, Tziavos I N, Vergos G S, Hausleitner W, Frantzis X, Tripolitsiotis A, Partsinevelos P, Andrikopoulos D. 2010. Statistical models and latest results in the determination of the absolute bias for the radar altimeters of Jason satellites using the Gavdos facility. Marine Geodesy, 33(S1): 114-149.
|
Mertikas S P, Zhou X H, Qiao F L, Daskalakis A, Lin M S, Peng H L, Tziavos I N, Vergos G, Tripolitsiotis A, Frantzis X. 2016b. First preliminary results for the absolute calibration of the Chinese HY-2 altimetric mission using the CRS1 calibration facilities in West Crete, Greece. Advances in Space Research, 57(1): 78-95.
DOI:10.1016/j.asr.2015.10.016 |
OSTM. 2017. OSTM/Jason-2 Products Handbook, Issue: 1 Rev 11. https://www.ospo.noaa.gov/Products/documents/hdbk_j2.pdf. Accessed on 2017-01-13.
|
Peng H L, Lin M S, Mu B, Zhou W. 2015. Global statistical evaluation and performance analysis of HY-2A satellite radar altimeter data. Acta Oceanologica Sinica, 37(7): 54-66.
(in Chinese with English abstract) |
Watson C, Coleman R, White N, Church J, Govind R. 2003. Absolute calibration of TOPEX/Poseidon and Jason-1 using GPS buoys in Bass Strait, Australia:special issue:Jason-1 calibration/validation. Marine Geodesy, 26(3-4): 285-304.
DOI:10.1080/714044522 |
Watson C, Legresy B, King M, Church J, Beardsley J, Hextall W. 2016. Altimeter absolute bias estimates from Bass Strait, Australia, oral. In: 2016 OSTST Meeting. OSTST, La Rochelle, France.
|
Watson C, White N, Church J, Burgette R, Tregoning P, Coleman R. 2011. Absolute calibration in Bass Strait, Australia:TOPEX, Jason-1 and OSTM/Jason-2. Marine Geodesy, 34(3-4): 242-260.
DOI:10.1080/01490419.2011.584834 |
Yang L, Zhou X H, Lin M S, Lei N, Mu B, Zhu L. 2016. Global statistical assessment of HY-2A altimeter IGDR data. Progress in Geophysics, 31(2): 629-636.
(in Chinese with English abstract) |
Zhai W L, Chen C T, Yan L H. 2012. The technology progress in the calibration of satellite altimeter using GPS-buoys. Hydrographic Surveying and Charting, 32(6): 40-43.
(in Chinese with English abstract) |